
A Guide to the Sensor Fusion Algorithm in 2026
When a passenger walks off a platform into a busy interchange, or a visitor enters a hospital atrium with five lifts, three corridors, and no visible reception desk, satellite navigation stops being useful. The blue dot becomes vague, delayed, or disappears entirely. For venue operators, that moment isn't a minor inconvenience. It's where signage, staff time, accessibility duties, and visitor experience all collide.
A sensor fusion algorithm is what makes infrastructure-free indoor navigation possible in that gap. It isn't magic, and it isn't just “using phone sensors”. It's a disciplined way of combining imperfect signals so the phone can keep estimating movement when GPS is weak or absent. That matters in stations, campuses, shopping centres, and healthcare estates because those are exactly the places where people need precise guidance most, yet radio signals are least dependable.
The Challenge of Indoor Navigation
You can see the problem in almost any complex venue. A person arrives at a rail station, follows outdoor navigation successfully, then steps inside and loses confidence within seconds. Signs compete for attention. Escalators split flows. Temporary barriers change the route. Staff get interrupted for directions again.
The same pattern shows up in hospitals and universities. The building may be well run, but navigation still breaks down at the point where the environment becomes a signal desert. GPS struggles indoors and underground. Wi-Fi positioning may be inconsistent. Bluetooth systems need hardware, upkeep, and a plan for what happens when the physical environment changes.
For operators, this isn't only a user issue. It becomes an operational one.
- More wayfinding queries mean more pressure on frontline staff.
- More route confusion means more missed appointments, delayed arrivals, and frustrated visitors.
- More dependence on fixed hardware means more maintenance in places that already have enough assets to manage.
That's why infrastructure-free navigation has become an engineering choice worth examining, not a novelty. The key question is whether the system can maintain reliable guidance using the sensors already in a smartphone, plus strong map logic, rather than relying on installed equipment across the estate.
Anyone who's watched indoor positioning fail in practice will recognise the limits of a simple moving dot. As discussed in Waymap's piece on why blue dots often break down indoors, what users need isn't a decorative location marker. They need guidance that holds up when the environment is complex, crowded, and structurally hostile to radio signals.
Indoor wayfinding fails less often because people lack maps, and more often because positioning becomes unreliable at the exact moment a decision is needed.
What Is a Sensor Fusion Algorithm?
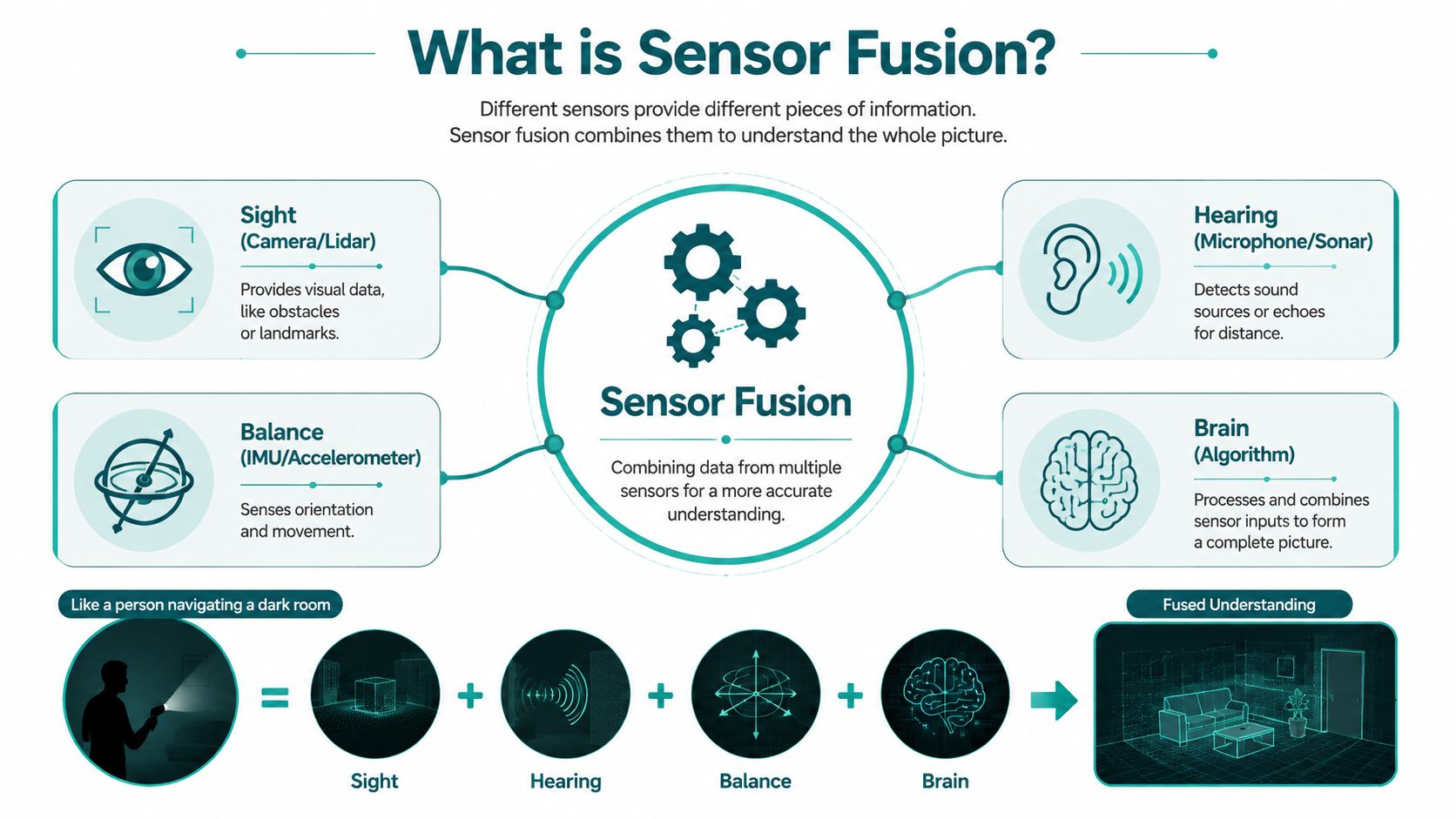
A sensor fusion algorithm combines data from multiple sources to produce a position or motion estimate that is more reliable than any one source alone. The formal study of sensor fusion predates smartphones by decades. A review in Advances in Multi-Sensor Data Fusion notes that the field had already been applied for decades in pattern recognition, object detection, surveillance, and related domains, with established approaches including Kalman filtering, Bayesian methods, PCA-based fusion, wavelets, and neural networks. The same review explains that the purpose of fusion has always been to reduce uncertainty and improve inference, not merely to stack data together, as described in the multi-sensor fusion review in Advances in Multi-Sensor Data Fusion.
Think of it like human navigation
A person walking through a dark room doesn't rely on one sense alone. They use balance, memory, hearing, and the feel of movement underfoot. None of those signals is perfect on its own, but together they support a usable judgement about direction and motion.
A smartphone does something similar. It collects partial clues from several sensors, then the algorithm weighs those clues and estimates what the user is doing.
The main sensors inside the phone
For pedestrian navigation, the key components usually include:
- Accelerometer. This detects linear movement and helps identify steps, motion changes, and the direction of gravity.
- Gyroscope. This measures rotational movement, which helps estimate changes in heading and orientation over time.
- Magnetometer. This acts like a digital compass and offers an external heading reference.
- Barometer. This can help detect elevation change, which is useful around stairs, escalators, bridges, and multi-level venues.
Together, these components are often discussed as part of the inertial measurement unit, or IMU. Waymap's article on inertial measurement units is a useful reference if you want the smartphone sensor stack explained in venue-navigation terms rather than robotics jargon.
Why no single sensor is enough
Each sensor fails differently. The gyroscope is good at short-term motion tracking but drifts over time. The accelerometer helps stabilise orientation but is noisy during normal walking. The magnetometer can provide heading, but indoor magnetic conditions are often poor. The barometer can hint at vertical change, but pressure alone doesn't tell you which route the person took.
That is exactly why fusion exists. The algorithm isn't looking for a perfect input. It's trying to produce a better estimate from several flawed ones.
How Common Navigation Algorithms Work
Most discussions of navigation algorithms become abstract too quickly. For a transit authority or venue team, the practical issue is simpler. Which algorithm copes with pedestrian movement, noisy sensors, and irregular indoor conditions without collapsing under its own complexity?
Complementary filters
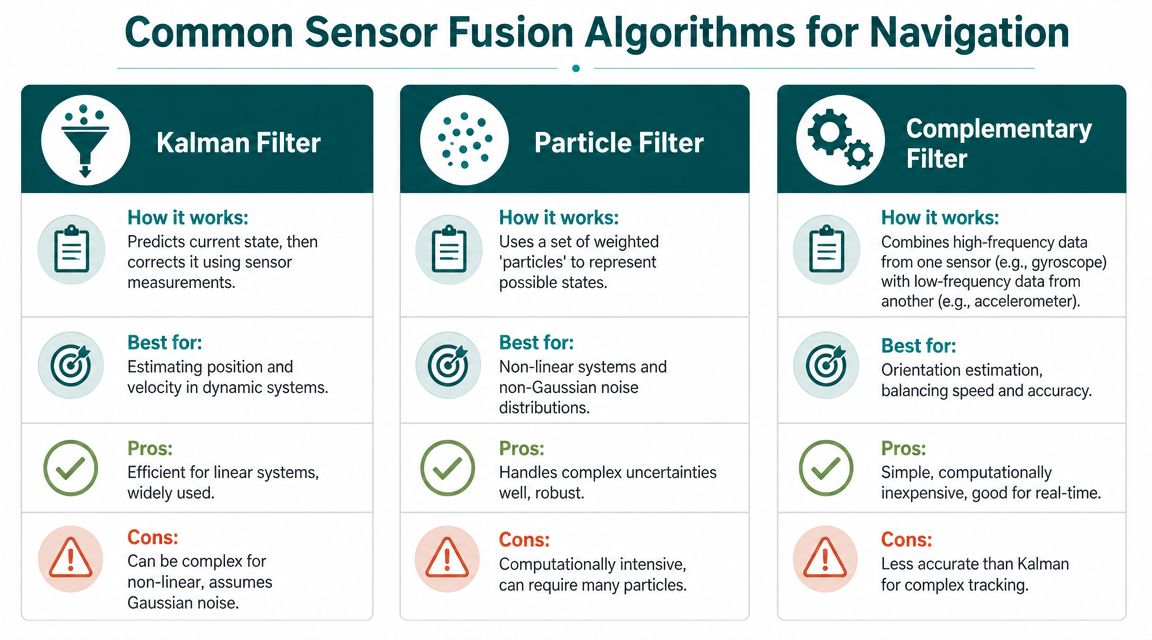
A complementary filter is often the simplest place to start. It blends fast-changing data from one sensor with slower, stabilising data from another. In practice, that usually means using the gyroscope for responsive motion tracking and the accelerometer or compass for longer-term correction.
Its strengths are obvious. It's lightweight, quick, and works well for basic orientation tasks.
Its weakness is just as clear. It doesn't usually provide enough sophistication for more demanding pedestrian localisation in complex venues, especially where sensor conflicts are common.
Kalman filters and related variants
Kalman filters are widely used because they do two useful things at once. They predict the next state based on the motion model, then correct that estimate when new measurements arrive.
That makes them a strong fit for navigation. People move continuously, not as isolated position snapshots. A good filter uses what probably happened between measurements, not just what the last sensor reading suggested.
Stanford ASL notes that the value of sensor fusion lies in using complementary error profiles, so one modality can support another where it is weak. Their example compares radar's stronger longitudinal accuracy with camera-based lateral precision. The same principle matters indoors, where inertial motion estimates need support from additional constraints rather than blind trust in any one sensor, as outlined in the Stanford ASL notes on uncertainty, correlation, and fusion.
Practical rule: If an algorithm doesn't model disagreement between inputs, it will fail gracefully only by accident.
Particle filters
Particle filters are useful when the system needs to entertain multiple possible positions at once. Instead of committing early to a single estimate, the algorithm maintains a spread of possible states and updates them as new evidence arrives.
That can be very effective in indoor navigation, especially around junctions, mirrored corridors, or repeated architectural patterns where ambiguity is normal. The trade-off is compute load and implementation complexity.
What works in practice
Different algorithm families suit different parts of the problem.
| Algorithm family | Good at | Trade-off |
|---|---|---|
| Complementary filter | Fast orientation smoothing | Limited in complex tracking |
| Kalman family | Continuous prediction and correction | Requires careful modelling |
| Particle filter | Ambiguous or non-linear localisation | Heavier computational demand |
A useful overview of the end-to-end stack sits in Waymap's explanation of how a navigation system works. The key operational point is that no serious indoor navigation system relies on one neat filter alone. Real deployments combine estimation methods, constraints, and fallback logic.
Why Drift Correction Is the Hardest Problem
Every pedestrian navigation system that relies on phone motion sensors has the same enemy. Drift.
The gyroscope is excellent at capturing short-term rotation, but tiny errors accumulate. Over time, the estimated heading slides away from the user's real heading. Once heading drifts, position drifts with it. After enough time, the system can become confident and wrong, which is more dangerous operationally than uncertainty that is openly flagged.

Why correction is never optional
The accelerometer helps by telling the phone where gravity is, which stabilises orientation. The magnetometer helps by providing a heading reference relative to the Earth's magnetic field. In textbook conditions, that combination works well enough to keep angular drift under control.
But venues are not textbook conditions.
Rail stations, shopping centres, hospitals, and large public buildings are full of steel, power systems, lifts, escalators, reinforced structures, and local electromagnetic distortion. That means the very sensor used to correct heading can itself become unreliable.
Where simple explainers fall short
Many sensor fusion explainers often conclude too early. They say the magnetometer corrects the gyroscope, then move on. Operationally, that's the point where the actual work starts.
UK-facing guidance cited in relation to IMU fusion notes that magnetometers are highly sensitive to local magnetic disturbances, which makes them a known vulnerability indoors. That matters directly in stations and large venues, because an effective fusion stack must sometimes down-weight or temporarily ignore magnetic input rather than accept bad heading data, as noted in this discussion of IMU sensor fusion and magnetic disturbance.
In difficult buildings, the question isn't whether the compass is available. It's whether the compass is believable.
What robust systems actually do
A stronger sensor fusion algorithm doesn't just average everything together. It asks harder questions:
- Is this magnetometer reading consistent with recent motion?
- Does the heading change fit the user's walking pattern?
- Has the environment likely introduced distortion near metal infrastructure or electrical equipment?
- Should the system rely more heavily on inertial continuity and map constraints until the magnetic signal stabilises?
This is why drift correction is the hardest part of infrastructure-free navigation. The challenge isn't only mathematical. It's contextual. The algorithm has to decide which signals deserve trust, and that decision changes as the user moves through the venue.
The Power of Map-Matching and Context
A strong inertial estimate still needs a reality check. That's where map-matching matters.
The National Academies' 2024 guide describes a mature fusion workflow with four high-level steps: pre-processing, spatial and temporal alignment, use-case-specific algorithm selection, and quality control with feedback. It also defines fusion as combining data from two or more sources to produce a more accurate, reliable, and less uncertain estimate than any single source can provide, as set out in the National Academies guide to data fusion workflow and quality control.
Why the map is part of the algorithm
If the motion model says a person has continued straight ahead, but the digital map shows a wall, that conflict is valuable. A well-designed system uses the map to constrain impossible outcomes and support plausible ones.
That changes the quality of navigation in a very practical way:
- Corridors become constraints, not just visual features on a screen.
- Stairwells and lifts become decision points that can be inferred from movement plus venue structure.
- Wrong turns become recoverable, because the system can compare live motion against valid route geometry.
Context beats raw coordinates
For pedestrian wayfinding, the user rarely needs abstract x-y-z precision. They need the system to know whether they are on the platform or concourse, at the correct corridor junction, or approaching the right entrance.
That is why pure sensor estimation is rarely enough on its own. Context closes the loop.
One infrastructure-free approach in the market is Waymap, which uses smartphone-native motion sensors with detailed map data for indoor, outdoor, and underground guidance without GPS, Wi-Fi, Bluetooth beacons, or installed hardware. In practice, this architecture matters most where layouts are complex and updates need to happen through software rather than estate works. Waymap's explanation of mapping and navigation captures the operational advantage clearly: the map is not decoration, it is a live constraint on the navigation model.
Good indoor navigation doesn't just estimate movement. It continuously checks whether that movement makes sense inside the built environment.
Choosing Your Approach Infrastructure vs Infrastructure-Free
Most operators are not deciding whether navigation matters. They're deciding which burden they want to own.
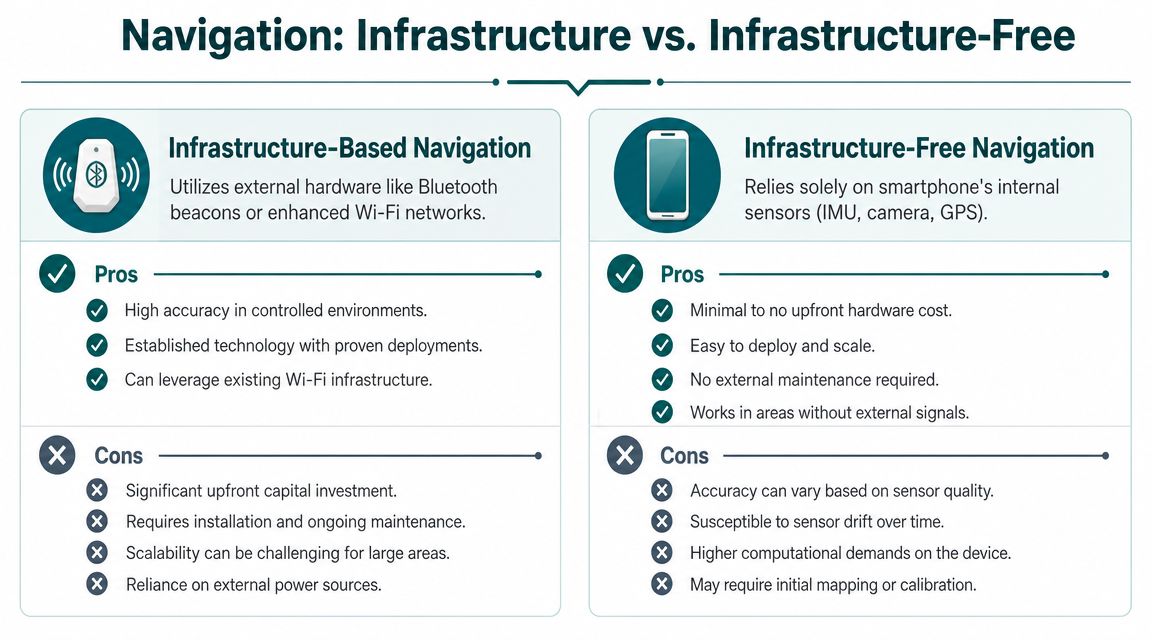
An infrastructure-based system usually means beacons, enhanced Wi-Fi, fixed reference points, power considerations, maintenance cycles, and a process for keeping the physical layer aligned with the physical venue. That can work, especially in controlled environments, but it creates an estate-management problem as much as a navigation one.
What changes when hardware is installed
For a transport operator or NHS estate, installed navigation hardware doesn't sit in isolation. It joins every other maintenance obligation already in the building.
That creates familiar friction:
- Asset upkeep. Hardware needs monitoring, replacement, and fault handling.
- Change management. Refurbishments, temporary barriers, retail churn, and platform works can all reduce system reliability.
- Budget approval cycles. Capital spend is often harder to approve than software and service updates.
- Operational dependency. The navigation experience becomes tied to infrastructure health.
What infrastructure-free changes
An infrastructure-free model shifts the problem away from estate hardware and towards software quality, sensor modelling, and map management. That is usually a better fit for venues that change frequently or span large, complex footprints.
Imec reports that a cooperative sensor-fusion approach can be up to 10% more efficient than standard methods, using early information exchange and feedback to focus processing on the most relevant scene content, according to its overview of sensor fusion algorithm efficiency and cooperative fusion. The lesson for venue systems is straightforward. Better fusion architecture can reduce wasted processing and support faster updates, but it also demands stronger engineering discipline because the components are more tightly coupled.
The compliance angle is practical, not theoretical
For UK venues, accessibility obligations under the Equality Act 2010 and design expectations such as BS 8300 are not solved by installing more hardware for its own sake. They are addressed by making navigation more usable, more reliable, and easier to keep current.
That's why infrastructure-free navigation is often the more deliberate choice. If your venue changes often, has underground sections, or can't absorb another layer of installed kit, a smartphone-led approach is usually easier to scale and maintain. For a useful summary of the operating context, see Waymap's discussion of GPS-denied navigation.
How to Evaluate Navigation Performance Metrics
The wrong way to evaluate a navigation system is to ask for a headline accuracy figure and stop there. A number on its own says very little about whether people complete routes reliably in live conditions.
What matters is performance in the places that create failure: escalator banks, busy concourses, underground ticket halls, hospital wings, and multi-level decision points. Recent UK-facing discussion of pedestrian validation highlights that lab-tested algorithms can behave very differently across varied surfaces, crowded environments, and underground networks such as those managed by Transport for London. The operational lesson is that independent field validation matters because real venues expose error budgets that lab tests often hide, as noted in this discussion of UK pedestrian navigation validation and operational testing.
The metrics worth asking for
Decision-makers should focus on questions like these:
- Does the user reach the correct destination consistently in a live venue?
- How well does the system recover after a wrong turn or pause?
- Does performance hold across different phone models?
- Is guidance still usable in crowds, underground, or during route changes?
What accessibility teams should prioritise
For blind and low-vision users, and for many other users under stress, predictability matters as much as raw precision.
A practical evaluation framework should include:
| Metric | Why it matters |
|---|---|
| Route completion | Measures whether guidance actually gets people there |
| Destination confidence | Tests whether arrival is identified at the right point |
| Recovery behaviour | Shows how the system handles inevitable user deviation |
| Device consistency | Reduces risk across mixed public smartphone fleets |
The best system is not the one with the most impressive lab demo. It's the one that still behaves sensibly when a passenger stops suddenly, a corridor is partially blocked, or the environment introduces sensor noise.
Frequently Asked Questions
What is a sensor fusion algorithm in indoor navigation
A sensor fusion algorithm combines data from multiple sensors to estimate movement and position more reliably than any single sensor can on its own. In indoor navigation, that usually means blending phone motion sensors with contextual constraints so guidance can continue where GPS is weak or unavailable.
Why not just use GPS indoors
Because GPS often becomes unreliable indoors and underground. Buildings attenuate or block satellite signals, and complex venues create exactly the conditions where another positioning method is needed.
Which sensors matter most for smartphone-based wayfinding
The core sensors are usually the accelerometer, gyroscope, magnetometer, and barometer. Together they help estimate steps, orientation, heading, and elevation change, although each one has limitations that the fusion logic must manage.
Is a sensor fusion algorithm the same as AI
No. A sensor fusion algorithm is a broader engineering approach for combining signals, and it can exist with or without AI components. Some systems now add adaptive or learned elements, but the core requirement is still reliable uncertainty management and state estimation.
Why does indoor heading drift over time
Heading drifts because small gyroscope errors accumulate. If correction signals are weak or misleading, the estimated direction gradually pulls away from reality.
Are magnetometers reliable in stations and large buildings
Not always. Magnetometers can be disrupted by local magnetic disturbance, which is common around metal structures, power systems, lifts, and other building infrastructure.
Is infrastructure-free navigation less accurate than beacon-based systems
Not necessarily. The answer depends on the quality of the sensor fusion algorithm, the map constraints, the validation process, and the operating environment. Beacon systems can perform well, but they also introduce hardware dependency and maintenance overhead.
What should a transport operator ask a vendor
Ask how the system behaves when sensors disagree, how it handles drift, how map updates are managed, how performance is validated in live venues, and how it recovers when a user deviates from the planned route. Those answers tell you more than a marketing accuracy claim.
How often do maps need updating
Maps should be updated whenever route geometry, points of interest, closures, or access conditions change in ways that affect guidance. In practice, the easier that update process is, the more sustainable the deployment will be.
What matters most for accessibility
Reliability matters most. Users need guidance that is consistent, recoverable, and understandable in real settings, not just a strong demonstration under ideal conditions.
If you're assessing infrastructure-free navigation for stations, campuses, hospitals, or large public venues, Waymap is worth reviewing as part of that process. Its approach uses smartphone-native sensors and map constraints rather than installed hardware, which makes it relevant for operators balancing accessibility, maintenance burden, and the realities of GPS-denied environments.