
Mastering Indoor Navigation with Inertial Measurement Units
Most venue operators know the moment. A visitor steps off a train, opens a map app, and watches the blue dot wobble between concourse, platform and street. In an airport it sends people to the wrong level. In a hospital it loses them at the lift bank. In an underground station it often gives up completely.
That failure matters because people don't experience a building as a floorplan. They experience it as a sequence of decisions made under pressure. Turn left or right. Take stairs or lift. Cross the ticket hall or stay on this side. If the location layer is wrong, the journey breaks.
Inertial measurement units are one of the core technologies that replace GPS when satellite signals can't do the job. They're already inside smartphones, and they work by measuring motion directly rather than waiting for an external signal to arrive. That's why they matter so much for indoor, underground and signal-poor environments.
Why GPS Fails Indoors and What Replaces It
A shopping centre manager sees it in customer complaints. A rail operator sees it in missed connections. An airport team sees it in passengers arriving stressed at gates they should have reached easily. GPS works well when a device has a clear view of satellites. Buildings, tunnels, underground passages and dense interiors break that assumption.
The UK has lived with this problem for a long time. The first London Underground line opened in 1863, creating an early transport environment where conventional navigation becomes difficult underground. That same constraint explains why modern inertial approaches matter so much today. IMU-based systems can estimate motion without GPS, which is exactly what subterranean systems like the Tube require, as noted in this overview of inertial measurement units.
The blue dot is the wrong model indoors
Most consumer mapping experiences were designed around outdoor positioning. They assume a user can be located by satellite, then nudged along a route by occasional updates. Indoors, that breaks down for two reasons.
- Signals don't reach cleanly: Concrete, steel, glazing, escalator voids and tunnel walls all interfere with reliable positioning.
- Floor level matters: A location that's roughly right on a map can still be operationally useless if it places someone on the wrong level or wrong side of a barrier.
- People need continuous guidance: In a complex venue, one bad update can send a person through the wrong corridor or gate line.
That's why the familiar moving map often becomes unreliable indoors. Wayfinding in these settings needs a different basis for positioning than the standard blue dot approach to navigation.
Indoors, the problem isn't just locating a person once. It's maintaining a believable position estimate through every turn, pause and change of level.
What replaces GPS indoors
The practical replacement is inertial sensing, often combined with detailed maps and routing logic. Instead of asking satellites where the user is, the system measures how the phone is moving. If the device knows where the journey started, and it can track motion accurately enough, it can estimate where the user is now.
That approach is attractive for public venues because it doesn't depend on a strong radio environment. It also scales better than trying to blanket every corridor, platform or foyer with additional hardware.
For operators, that changes the conversation. The question stops being “How do we improve GPS indoors?” and becomes “How do we turn the sensors already in the visitor's pocket into a reliable navigation signal?”
What Are the Components of an Inertial Measurement Unit?
An IMU is a small sensor package that measures movement. In most practical systems, it combines multiple sensors so software can interpret how a device is travelling through space.
A standard IMU is usually built from a 3-axis accelerometer plus a 3-axis gyroscope, and some versions add a 3-axis magnetometer, making 6-axis or 9-axis systems. Published performance ranges vary widely, from about 0.1°/s to 0.001°/h for gyroscopes and from 100 mg down to 10 μg for accelerometers, which helps explain why some units are suitable for consumer devices while others are used in much more demanding environments, according to JOUAV's IMU overview.
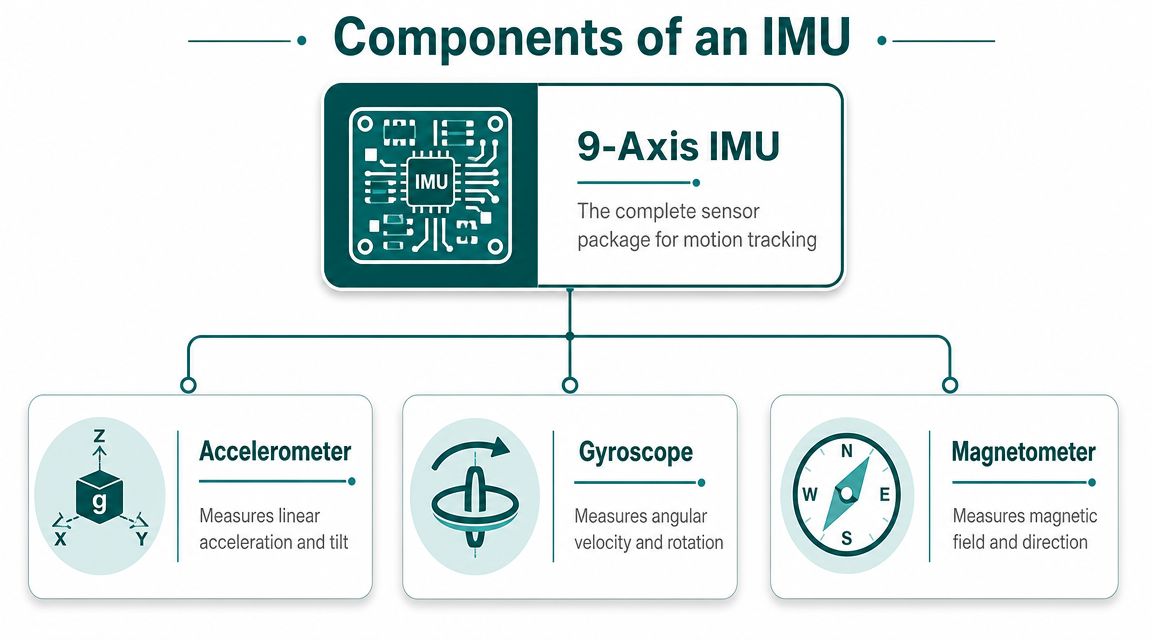
The accelerometer senses push and pull
The accelerometer measures linear acceleration along three axes. A simple way to picture it is a tiny weight inside a box. When the box moves, the weight shifts. The sensor records that change.
In a phone, that helps detect things like:
- Steps and starts: When someone begins walking, stops, or changes pace
- Tilt relative to gravity: Useful for understanding phone posture
- Motion events: Such as climbing stairs, descending ramps or making sharp changes in direction
For indoor navigation, accelerometers are valuable because they give software a continuous stream of movement data rather than a one-off position fix.
The gyroscope tracks rotation
The gyroscope measures angular rate. In plain English, it tells the system how quickly the device is turning around each axis. If the accelerometer says “you moved”, the gyroscope says “you rotated”.
That matters because public navigation depends heavily on heading changes. A route instruction like “turn right after the ticket barriers” only works if the system can detect that turn cleanly.
Practical rule: If you want a phone to behave like a serious navigation instrument indoors, the gyroscope does a lot of the heavy lifting during turns.
The magnetometer adds directional context
The magnetometer measures magnetic field direction. It is commonly understood as the part that behaves like a digital compass.
In theory, that sounds ideal. In practice, indoor spaces can be magnetically messy. Steel structures, lifts, power systems and retail fit-outs can distort magnetic readings. So magnetometers can help, but they aren't a magic answer inside stations, hospitals or shopping centres.
That's why engineers rarely trust any one sensor on its own. The useful signal comes from combining them intelligently.
For teams experimenting with mobile motion data, a resource like Capgo's open-source accelerometer plugin is a practical way to understand what raw sensor access looks like on a smartphone before tackling full navigation logic.
How Do IMUs Calculate Position and Orientation?
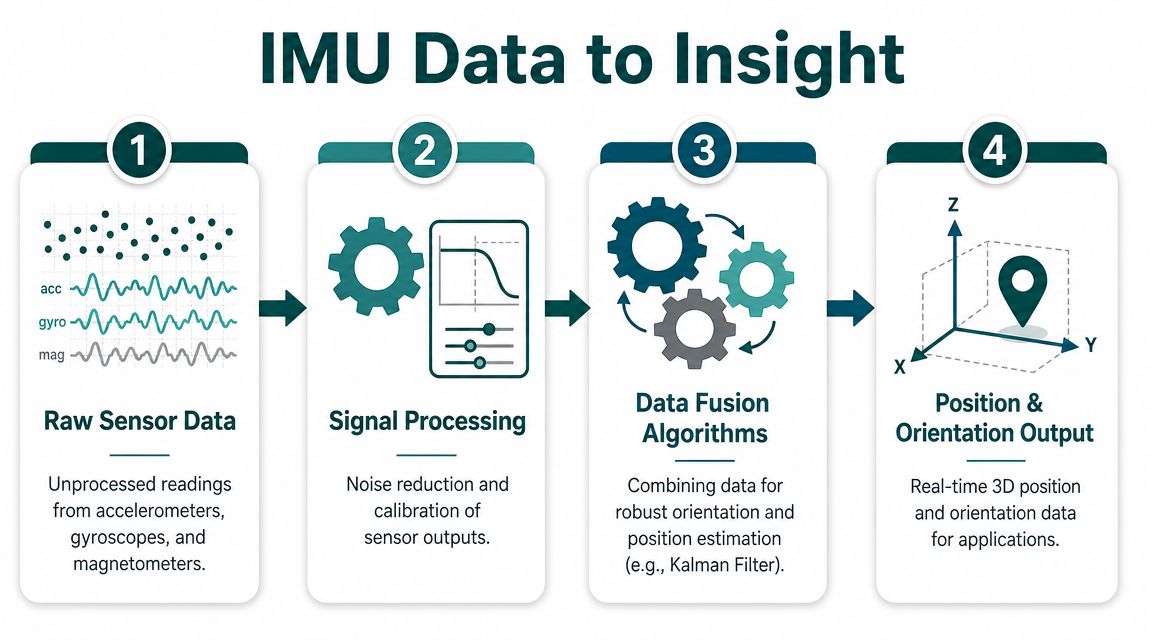
An IMU doesn't read out “you are here” like a postcode lookup. It produces streams of raw motion data, then software turns those readings into an estimate of movement and orientation over time.
That process is often called dead reckoning. Start from a known point, measure motion continuously, and keep updating the estimate of where the user has gone next.
From raw sensor readings to movement
At a high level, the logic works like this:
- Read the accelerometer and gyroscope data many times each second.
- Filter and calibrate the signal so noise and bias don't dominate the result.
- Estimate orientation so the system knows which way the device is facing.
- Advance the user's position based on the pattern of motion.
This is why inertial navigation feels different from simple map matching. It isn't waiting for a fresh external fix. It is continuously building a position estimate from movement itself.
A useful analogy is walking through a dark room after counting your steps from the doorway. If you know where you started, and you keep track of each step and turn, you can build a usable estimate of where you are, even without seeing the room clearly.
Orientation is inferred, not measured directly
One subtle point is often missed in non-technical explanations. Orientation is inferred rather than directly measured. Accelerometers measure specific force and gyroscopes measure angular rate, so absolute angle depends on sensor fusion, calibration and a reference frame. That's the core reason drift appears in IMU systems, as explained in this article on why an IMU cannot measure angles directly.
That distinction matters for operators because it explains both the power and the limitation of inertial methods. The hardware gives you motion signals. The software has to turn those signals into something stable enough for real navigation.
Why drift appears
Every sensor has imperfections. A tiny bias in angular rate, a small noise spike, or a slight calibration error doesn't look serious in one sample. But dead reckoning adds up readings over time. Small errors accumulate.
That accumulation is called drift. Left unmanaged, the estimated position gradually departs from the person's real position.
In practical deployments, that's the engineering problem that decides whether a system feels trustworthy. It's also why a serious internal navigation system depends as much on algorithms and map logic as it does on the sensors themselves.
Why Sensor Fusion and Drift Mitigation Are Essential
No venue operator needs a perfect sensor. They need a navigation service that stays believable from entrance to destination. Those are different things.
An IMU on its own will drift. The way you control that isn't by pretending the sensor is flawless. You combine imperfect signals, compare them against known constraints, and keep correcting the estimate. That's sensor fusion.
One sensor lies differently from another
The accelerometer is useful, but it can confuse gravity with motion if the device is moving dynamically. The gyroscope captures turns well, but small biases build up over time. The magnetometer can offer heading context, but indoor magnetic distortion can make it unreliable.
Taken separately, each sensor has blind spots. Taken together, they become much more useful.
Think of sensor fusion as cross-checking several imperfect witnesses. None of them gives the full story. The system looks for the version of events that best fits all of them.
In practice, this usually means a filtering layer that continually weighs the incoming measurements and updates the most likely state of the device. Readers will often hear names like Kalman filter or Madgwick filter. The labels matter less than the principle. The software doesn't treat every reading as equally trustworthy. It decides what to trust, when, and by how much.
Drift mitigation depends on behaviour and context
Good inertial navigation also uses the structure of human movement. Walking is not random. People step, slow, stop, turn at junctions, and follow paths constrained by corridors, platforms and entrances.
That creates opportunities to reduce error:
- Stop events can reset assumptions: When a person pauses, the system can use that stillness to reduce accumulated motion error.
- Map constraints narrow the options: If a route can only continue down a corridor or through a doorway, the software can reject impossible trajectories.
- Step patterns add consistency: Personal walking style can help stabilise distance estimation over the course of a journey.
This matters especially in UK-style transport settings, where enclosed and underground environments are part of the network rather than edge cases. The technical need for inertial navigation became practically important in the same broad context that made the Underground so distinctive in the first place. Rail spaces below ground remove line-of-sight navigation and external signal certainty. That's why modern IMU-based wayfinding is such a natural fit for these environments, as discussed in this mapping and navigation overview.
What works and what doesn't
What works is a full system view. Sensors, calibration, motion modelling, route geometry and user behaviour all contribute to the final result.
What doesn't work is relying on a single trick.
| Approach | What happens in practice |
|---|---|
| Raw IMU data alone | Position quality degrades as drift accumulates |
| Compass-heavy indoor logic | Magnetic interference causes unstable heading in many venues |
| Map-aware sensor fusion | The estimate stays anchored to real movement and real paths |
The operational lesson is straightforward. If you're assessing indoor navigation for a station, hospital or campus, don't ask only which sensor is inside the device. Ask how the full stack controls drift over the entire route.
Smartphone IMUs vs Dedicated Units What Is the Difference?
This is the procurement question behind most indoor navigation conversations. Do you need specialised hardware, or can the smartphone in a visitor's hand do the job?
The answer depends on the application. If you are guiding the public through a venue at scale, the trade-off usually points in a different direction than it would for aerospace, defence or industrial surveying.
Dedicated units are built for precision first
High-end IMUs exist for good reasons. Some published descriptions put top-end unit costs around $100,000, with performance suitable for navigating in GPS-denied environments for hours, as noted in the earlier JOUAV source. That class of device is designed for applications where the hardware itself has to carry far more of the burden.
For many public-facing services, that's overkill. Requiring every passenger, visitor or shopper to carry specialist equipment isn't a realistic operating model.
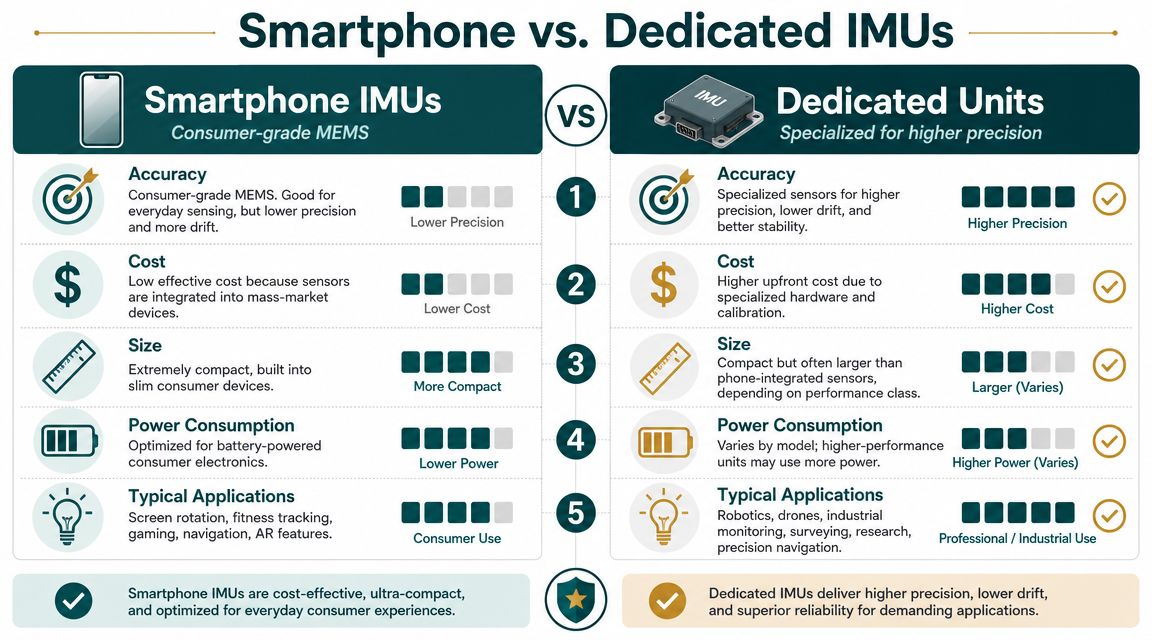
Smartphones are built for scale first
Smartphone IMUs are consumer-grade MEMS sensors. They are smaller, cheaper and far more widely available than dedicated units. They also vary from handset to handset and aren't individually selected for elite inertial performance.
That sounds like a disadvantage, and sometimes it is. But for mass-market navigation, ubiquity is a serious asset. The hardware is already deployed. The user already carries it. The venue doesn't need to issue, maintain or recover devices.
Here's the practical comparison:
- Dedicated IMUs: Better raw performance, higher cost, specialised deployment model
- Smartphone IMUs: Lower raw precision, but far easier to deploy to the public
- Infrastructure-heavy alternatives: Can work in some settings, but add installation and maintenance burden across the estate
Real-world accuracy is uneven
One reason this comparison needs honesty is that IMU accuracy isn't uniform across all movements. A validation study reported RMS errors of 2.9±0.9° and 1.6±1.1° for neck and trunk flexion-extension, while shoulder elevation and elbow flexion errors increased to 6.8±2.7° and 8.2±2.8°, with the IMU underestimating larger angles and overestimating smaller ones, according to this peer-reviewed validation study.
That study is not a direct proxy for every navigation task, but it highlights an important operational truth. Performance changes with context and movement type. If a device behaves differently across body motions in a validation setting, it's reasonable to expect indoor public navigation to depend heavily on how the software interprets movement in crowded, dynamic spaces.
The right question isn't “Are smartphone IMUs as good as dedicated units?” It's “Are they good enough for this service when paired with the right algorithms?”
What that means for venue operators
For public wayfinding, smartphone-first systems are often the more practical choice because they remove adoption barriers. The device is already there. The deployment can focus on digital mapping, routing and motion interpretation rather than hardware distribution.
That also helps explain why some operators compare inertial approaches with radio-based options such as ultra-wideband and related positioning methods. Different tools suit different tasks. But if your goal is a public navigation layer that works across existing spaces without installing new estate-wide infrastructure, smartphone IMUs become very attractive.
How Are IMUs Used for Indoor Wayfinding in Large Venues?
In practice, IMUs matter when a person needs dependable guidance through a place that's hard to read quickly. That could be a station interchange, a hospital campus, a shopping centre, an airport terminal or a university estate.
The operational advantage is simple. Motion sensing lets a navigation service keep guiding people where external signals are weak or absent.

Where venue teams see the benefit first
The first gains usually appear in places where static signage reaches its limit.
- Transport hubs: Passengers need route continuity across entrances, ticket halls, platforms and interchanges.
- Healthcare sites: Visitors often arrive stressed, unfamiliar with the site, and under time pressure.
- Retail and mixed-use venues: People want the quickest route to a store, service desk, toilet or exit, not a map they have to interpret.
- Campuses and civic estates: Buildings with multiple entrances and changing room usage need a guidance layer that can be updated without replacing physical signs.
For accessibility teams, there's another dimension. Navigation isn't only about convenience. It is also about whether a person can complete a journey independently and with confidence. In the UK, that sits naturally alongside the expectations many organisations already consider under the Equality Act 2010.
Infrastructure-free indoor navigation changes the operating model
Traditional indoor positioning projects often come with an estate problem. Hardware has to be installed, powered, checked and maintained. Renovations then break assumptions. Temporary closures create gaps. Operational teams inherit an ongoing burden.
A system built around smartphone motion sensors and map intelligence changes that model. It shifts effort away from physical infrastructure and toward maintaining an accurate digital representation of the venue.
That is why many operators are now evaluating indoor positioning systems for complex public environments through an operational lens, not just a technical one.
A practical deployment pattern
When IMU-based wayfinding is implemented well, the user experience tends to follow a pattern:
- Start from a known location such as an entrance, platform, reception desk or selected point on the map.
- Track movement continuously using the phone's motion sensors.
- Match progress to the mapped route so the person receives relevant turn-by-turn guidance.
- Adjust for pauses, turns and changes of level so instructions remain believable.
That model is one reason Waymap uses advanced sensor fusion and dead reckoning with smartphone sensors and detailed maps for infrastructure-free navigation. In named deployments and references associated with the platform, environments such as WMATA, Westfield London, SBS Transit, and the Royal Hospital for Children and Young People illustrate the kinds of large, complex venues where this approach is relevant.
A short demonstration makes the concept easier to grasp in real movement conditions.
What operators should evaluate
When assessing IMU-based wayfinding, venue teams should focus less on sensor jargon and more on service outcomes:
- Does it work where signals are poor?
- Can it guide through multi-level, high-footfall spaces?
- How much infrastructure has to be installed and maintained?
- Can destinations, closures and points of interest be updated quickly?
- Does the guidance support accessible journeys, including audio-led use?
Those are operational questions. In the end, that's the right frame. Indoor wayfinding isn't a sensor project. It's a service design problem with sensor technology underneath it.
Frequently Asked Questions About Inertial Measurement Units
Can inertial measurement units work without GPS?
Yes. Inertial measurement units can work without GPS because they estimate motion from onboard sensors rather than external satellite signals. That's why they are useful in underground, indoor and signal-poor environments.
Do inertial measurement units measure angle directly?
No. Inertial measurement units do not measure angle directly. They measure specific force and angular rate, and the system infers orientation through calibration, sensor fusion and a reference frame.
What is the difference between an IMU and an AHRS?
An IMU is the sensor package. An AHRS (Attitude and Heading Reference System) is a higher-level system that uses IMU data, and often additional processing, to produce a more usable orientation output.
Do smartphone inertial measurement units need calibration?
Yes, in practice they do. Calibration matters because even small biases and offsets can accumulate into noticeable drift over time, especially in dead reckoning applications.
Are inertial measurement units accurate enough for indoor navigation?
They can be, but not by sensor quality alone. For public indoor navigation, usefulness depends on the whole system: motion modelling, sensor fusion, map constraints and how the software handles drift.
Why do inertial measurement units drift?
They drift because tiny measurement errors accumulate over time. Dead reckoning continuously advances position from previous motion estimates, so small inaccuracies don't stay small unless the system corrects them.
Are dedicated IMUs always better than phone sensors?
They are better in raw precision terms for many specialised applications, but that doesn't automatically make them the right choice for public wayfinding. For large venues, smartphone sensors are often more practical because visitors already carry the hardware.
Do inertial measurement units need Wi-Fi or Bluetooth beacons?
Not necessarily. An IMU can estimate movement without Wi-Fi or Bluetooth beacons, although some navigation systems combine inertial sensing with other signals depending on the design.
If you're evaluating indoor navigation for a station, campus, hospital or major venue, Waymap is one place to start. It uses smartphone motion sensors and detailed mapping to support navigation indoors, outdoors and underground without relying on GPS, Wi-Fi or installed hardware.