
Route Optimization Algorithm Explained: Waymap's Approach
A route feels simple until it fails at the exact point the user needs certainty. A driver can recover from a poor turn with a quick reroute. A passenger in a rail interchange, a visitor in a hospital, or a blind traveller trying to find the right platform entrance can't rely on that kind of rough correction. They need navigation that understands constraints before the journey starts, then keeps working when GPS, Wi-Fi, and standard indoor positioning methods don't.
That's why a route optimization algorithm matters. Not as an abstract computer science term, but as the logic that decides what “best route” means in practice. On roads, that usually means balancing travel time, distance, vehicle capacity, time windows, and depot rules. Inside stations, campuses, airports, retail centres, and hospitals, the problem changes. The last metre becomes as important as the first mile.
What Is a Route Optimization Algorithm?
A route optimization algorithm selects a route that satisfies a defined set of constraints for a specific user, trip, and environment. In engineering terms, it solves a constrained decision problem. The output is not just a line from origin to destination. It is the most usable route according to the rules that matter in context.
A driver approaching a delivery stop, a passenger changing platforms in a rail station, and a blind pedestrian trying to find the correct entrance may all be travelling between nearby points. They still need different routes. The algorithm has to account for what is physically accessible, what is permitted, what is reliable, and what can be followed on the ground.
That is the difference between route calculation and route optimization. Path calculation can identify a possible way through a network. Optimization ranks the alternatives against real constraints and chooses one that is fit for use.
What the algorithm is really solving
In practice, route optimization balances several conditions at once:
- Time: Does the route support the required arrival time or service window?
- Distance: Is the path efficient without creating avoidable detours?
- Access: Is the route open, legal, and appropriate for the user?
- Capacity: Can the vehicle, corridor, lift, or walkway support the movement being planned?
- Reliability: Will the route remain usable if conditions change mid-journey?
For road transport, those constraints usually come from fleet operations. For pedestrian guidance, especially indoors and underground, the constraints become more granular. A route that looks short on a map can fail in practice if it depends on an inaccessible gate, a staircase, a closed passage, or an entrance on the wrong side of a building.
This distinction is important because pedestrian routing is often treated as a simplified version of vehicle routing when it is a different problem class in practice. Vehicle algorithms are built around roads, travel times, depots, and delivery sequences. Pedestrian and indoor systems must deal with turn-level certainty, vertical movement, ambiguous entrances, weak positioning signals, and the fact that the final few metres often determine whether the journey succeeds at all.
A broader explanation of navigation system logic helps frame that system-level view, but the core definition is simple. A route is only optimized if the intended user can follow it reliably from the start point to the correct destination, including the parts of the journey where standard outdoor assumptions stop working.
What Are the Mathematical Foundations of Route Optimization?
Route optimization starts with a mathematical model of movement through a network. Nodes represent places. Edges represent the paths between them. Costs sit on those edges and may reflect distance, time, effort, risk, or a penalty for using a route that is technically possible but operationally poor.
Two classic problem families shaped most of the field. They still matter because they define the difference between choosing a path and coordinating a set of paths under constraints.
The Traveling Salesman Problem
The Traveling Salesman Problem, or TSP, asks for the shortest closed tour through a set of locations. One traveller visits every stop once and returns to the start. The challenge is not the definition. The challenge is the explosion in possible visit orders as each new stop is added.
That combinatorial growth is why TSP became a standard benchmark in operations research and computer science. It captures a core routing difficulty cleanly. The route is not just a line on a map. It is an ordering problem over many feasible permutations.
A historical reference point often cited in transport optimisation is the early work of Dantzig and Ramser on truck dispatching, published in the Journal of the Operations Research Society of America in 1959. Their paper helped establish route planning as a formal optimisation problem rather than a manual scheduling exercise.
The Vehicle Routing Problem
The Vehicle Routing Problem, or VRP, extends the same logic to real operations. Instead of one traveller, there are multiple vehicles. Instead of one tour, there is a set of routes that must work together. Each assignment affects the others because they share depots, drivers, vehicle limits, service times, and delivery commitments.
In practice, VRP is usually modelled as an optimisation problem with an objective function and a stack of constraints. The objective might be lower total distance, lower cost, better on-time performance, or a weighted mix of all three. The constraints are what make the model useful.
Typical constraints include:
- Vehicle capacity
- Time windows
- Travel time
- Depot structure
- Stop sequencing
This is the mathematical base behind most fleet routing systems. It is well understood, and for road vehicles it maps reasonably well to the physical world because roads, turns, and legal access rules are relatively explicit.
Why this foundation only gets you part of the way indoors
The same mathematics still applies indoors and underground at a high level. A person is moving through a graph with costs and constraints. But pedestrian navigation adds variables that classical vehicle models usually abstract away or assume are already solved.
Indoor routing depends heavily on state estimation. The system must know which corridor, entrance, floor, or side of a barrier the user is on. A staircase and a lift may connect the same two levels while having completely different suitability for different users. Two doors can be five metres apart in Euclidean space and function as entirely different graph nodes because one is locked, staff-only, or reachable only after a turnstile.
That is why pedestrian and indoor route optimisation cannot stop at TSP or VRP logic. The optimisation layer still matters, but it sits on top of a harder localisation problem. If position drifts, the mathematically correct route is irrelevant because the user cannot follow it reliably. That is also why accurate inertial sensing matters in places where satellite signals fail, and why we have written separately about inertial sensing and IMU performance.
A route is only as good as the model underneath it. Indoors, that model must represent movement, access, vertical transitions, and user position with much finer detail than vehicle routing usually requires.
How Do Common Route Optimization Algorithms Work?
A dispatcher trying to sequence twelve vans across a city and a passenger trying to reach the correct platform inside a station may both ask for the "best route." Under the hood, those are different optimisation problems. Common route optimisation algorithms were built first for road networks, where the graph is relatively stable, travel costs are easier to estimate, and the main challenge is choosing a good sequence under operational constraints.
Heuristics, exact methods, and metaheuristics
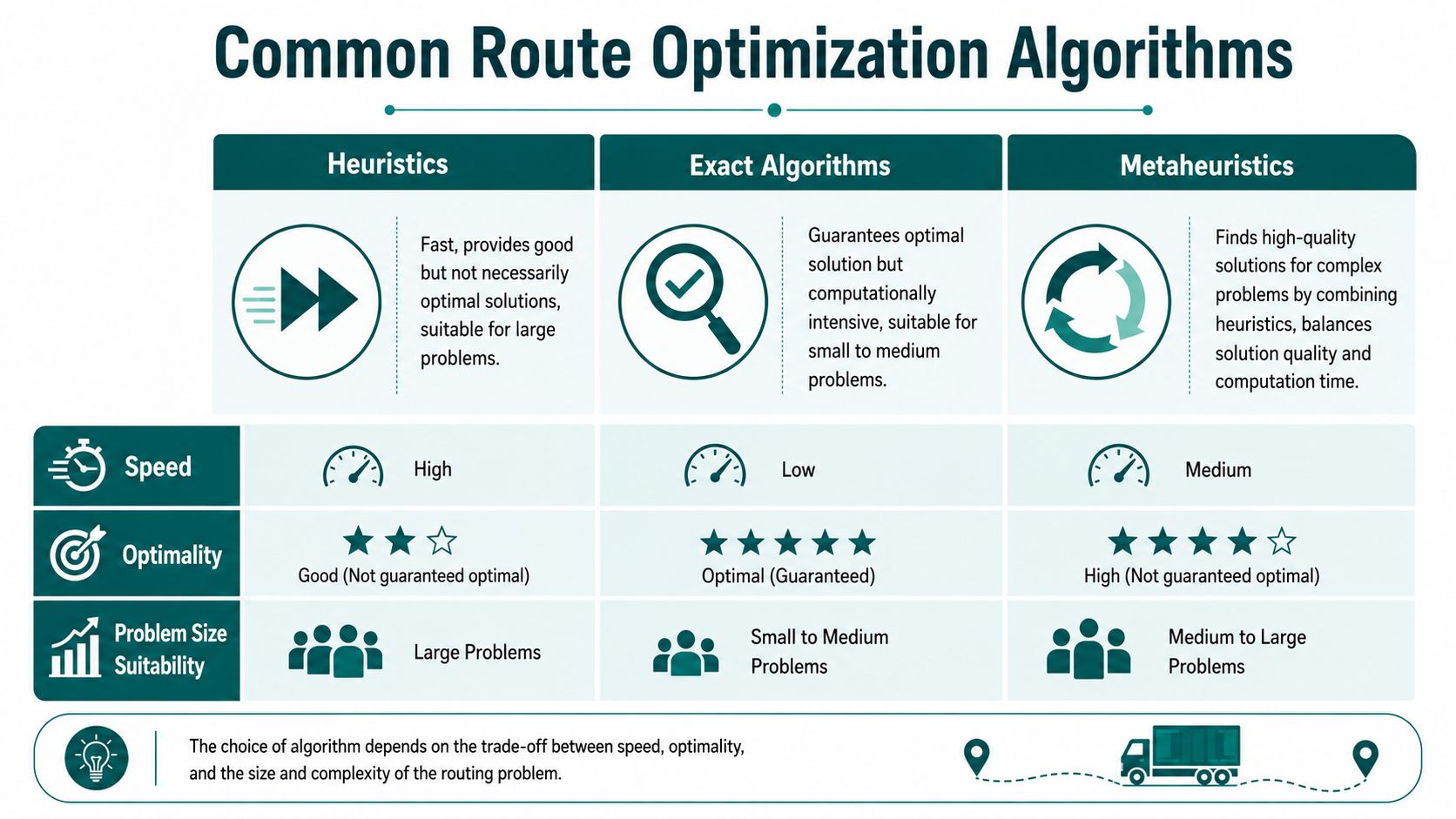
In practice, most solvers fall into three groups:
| Approach | What it does well | Where it struggles |
|---|---|---|
| Heuristics | Produces a usable answer fast | Does not prove optimality |
| Exact algorithms | Finds and verifies the optimal solution | Runtime grows sharply with scale and added constraints |
| Metaheuristics | Explores large search spaces and improves weak initial plans | Quality depends heavily on the model and tuning |
Heuristics are the workhorses of day-to-day operations. Nearest-neighbour rules, greedy insertion, and local search can get to a feasible plan quickly, which is often more useful than chasing a mathematically perfect answer that arrives too late to use.
Exact methods such as branch-and-bound or mixed-integer optimisation earn their place when the problem is small, tightly defined, or expensive enough that proof of optimality justifies the compute cost. Metaheuristics such as tabu search, simulated annealing, and genetic algorithms are often used when the search space is too large for exact methods and too constrained for simple rules to perform well.
Why hybrid solvers dominate real deployments
Operational systems rarely rely on a single technique. They usually combine a graph engine for path costs with an optimisation layer that tests candidate plans against business rules, service promises, and resource limits.
For UK road networks, this is significant because the primary task is usually a constrained vehicle routing problem, not a plain shortest-path query. The solver may need to account for time windows, driver shifts, vehicle capacity, road restrictions, and stop priorities at the same time. In that setting, a fast feasible answer plus iterative improvement often beats an elegant algorithm that assumes the world is cleaner than it is.
A practical solver usually follows a simple pattern:
- Generate a feasible initial plan.
- Check it against hard constraints.
- Improve it until the gain from more computation is no longer worth the time.
That is the trade-off experienced teams make. They do not ask for "the best algorithm" in isolation. They ask which method gives the best result within the available time, data quality, and operational tolerance for failure.
What transfers well, and what does not
Some lessons carry across almost every deployment.
- What works: Constraint-first modelling. If an entrance closes early, a lift is out of service, or a route must stay step-free, those rules need to be encoded before optimisation starts.
- What works: Iterative improvement. Initial plans are rarely the final plans.
- What works: Separating network cost calculation from higher-level optimisation, so each layer can be updated without rebuilding the whole stack.
- What does not: Treating shortest path as the same problem as route optimisation.
- What does not: Assuming the source data includes every operational rule that affects movement.
This is also where the article needs to pivot away from standard logistics examples. Vehicle algorithms assume the system already knows where the traveller is on the network and which edges are traversable. Pedestrian wayfinding indoors does not get that luxury. A route through a station, hospital, or campus depends on floor changes, barriers, access rights, walking geometry, and the user's actual position at metre-level precision. That is a different class of problem than sequencing deliveries.
Teams evaluating pedestrian guidance often discover the same gap described in our article on indoor positioning technologies and their limits. Good routing logic still matters, but for the last metre, the algorithm has to work with localisation that remains accurate without relying on installed infrastructure.
Why Do Traditional Algorithms Fail Indoors and Underground?
Most traditional routing logic was designed for roads, vehicles, and reasonably stable map data. Indoor and underground environments break those assumptions.

The map isn't the territory
In a station, airport, campus, shopping centre, or hospital, the formal map rarely contains everything that matters. The route may depend on a gate that closes at certain times, a lift that's temporarily unavailable, a security rule known only to staff, or a walking path people commonly use even though it doesn't appear in the data model.
Route optimization often breaks down when systems rely only on documented data, because many constraints such as access restrictions and site-specific walking paths are known only to operational staff and aren't captured in information systems. That problem is especially relevant in public transport interchanges, airports, and campuses where the final metres matter, as discussed in this analysis of route optimization and real-world operations.
GPS loss is only the first problem
People often reduce indoor failure to one issue: no GPS. That's true, but it's incomplete.
A navigation system can fail indoors for at least four distinct reasons:
- Position uncertainty: The app doesn't know the user's location precisely enough.
- Constraint blindness: The route engine doesn't know about practical restrictions.
- Destination ambiguity: “Arrived” may mean the wrong entrance, level, or side of a venue.
- Instruction mismatch: The route may be valid on a map but unusable in spoken, turn-by-turn form.
That last point matters more than many teams expect. Drivers can tolerate coarse rerouting. Pedestrians, especially in crowded or unfamiliar venues, need instruction quality that matches the space.
For a closer look at why common blue-dot experiences break down when precision matters, see our piece on the problem with blue dots in navigation.
The last metre is a different class of problem
A vehicle route can end at a postcode, car park, or depot gate. Pedestrian routing often needs to end at a specific door, lift lobby, ticket barrier, platform access point, reception desk, or seat block. That changes both the optimisation target and the navigation method.
At this stage, conventional location stacks usually run out of useful resolution.
The practical consequences are easier to see in motion:
Solving the Last Metre with Waymap's Sensor-Fusion Approach
Indoor and underground navigation needs a different answer from vehicle routing. It still needs optimisation, but it also needs accurate pedestrian positioning without depending on infrastructure that is expensive to install and difficult to maintain.
Why pedestrian optimisation is multi-objective
The shortest route for a person isn't always the right route. Research on the time-distance dilemma shows that shortest and fastest can conflict, and for pedestrians, especially disabled pedestrians, optimisation may also need to consider avoiding stairs, using accessible entrances, or reducing time in crowded areas. That turns the problem into a multi-objective one, as described in this research on the time-distance dilemma in routing.
In other words, “optimal” depends on the user and the environment.
A blind traveller may prioritise reliable step-free guidance and exact destination confirmation. A hospital visitor may prioritise the least confusing path. A station operator may prioritise routes that remain valid during disruption or crowding. Those aren't edge cases. They are the routing problem.
What an infrastructure-free model changes
A materially different technical approach is taken by Waymap. The platform uses dead reckoning from the smartphone's native motion sensors, fused with detailed maps, to provide step-accurate guidance indoors, outdoors, and underground without relying on GPS, Wi-Fi, or installed beacon hardware. That matters in high-change venues where hardware maintenance, calibration, and capital approval become operational barriers.
For estates teams and transport operators, the infrastructure question is often decisive. Beacon-based systems can look plausible in procurement documents but become difficult to maintain across busy, changing spaces. Software-first navigation avoids much of that burden.
A detailed technical overview of this method appears in our article on the sensor fusion algorithm used for precision navigation.
Good indoor routing doesn't start with “Where can we install hardware?” It starts with “How will the user know they are on the correct path right now?”
Why regulation and operations point in the same direction
In the UK, the Equality Act 2010 creates a practical reason to think beyond signage-only wayfinding. Operators need navigation that supports inclusive access without requiring every visitor to decode a complex space visually.
That doesn't mean every navigation product is suitable. The solution has to survive real operational conditions:
- Frequent layout changes
- Temporary closures
- Signal-poor corridors and underground spaces
- Different mobility and accessibility needs
- Staff knowledge that isn't yet reflected in formal mapping data
Infrastructure-free deployment is often the more practical path. It's easier to roll out, easier to update, and better aligned with environments that change often.
How to Evaluate and Implement a Navigation Solution
A navigation procurement should be treated as an operational decision, not a feature comparison exercise. Many systems look capable in a demo because demos usually happen in controlled conditions.
What to test before you buy
Start with questions that expose operational reality.
| Evaluation area | What to ask |
|---|---|
| Accuracy | Can the system guide a person to the correct entrance, platform access point, or room, not just the building? |
| Reliability | Does it keep working in underground areas, atriums, lifts, and signal-poor corridors? |
| Maintenance | Who updates route logic when layouts, access rules, or points of interest change? |
| Cost model | Are you buying software, hardware, installation, and ongoing site maintenance together? |
| Accessibility | Can the route logic account for step-free access and other user-specific constraints? |
Where many projects go wrong
The common failure isn't poor intent. It's buying a system designed around the wrong unit of analysis.
If your core problem is pedestrian navigation in a complex venue, don't start with vehicle-routing assumptions and don't assume hardware density equals route quality. Start with the destination precision you need and the constraints your users face.
The scale argument is easy to underestimate. The Department for Transport reports that Great Britain's roads carried about 336 billion vehicle miles in 2023, which shows how small inefficiencies compound at network scale, as noted in this route optimization discussion referencing Department for Transport mileage. Large venues and transit networks face a related compounding effect in pedestrian movement. Minor wayfinding failures repeat across thousands of journeys.
A practical rollout sequence
A sensible implementation path usually looks like this:
- Define the hardest journeys first. Don't start with the easy corridor. Start with the route that currently generates complaints, staff interventions, or accessibility friction.
- Capture hidden constraints. Formal map data won't be enough. Speak to front-line staff.
- Test destination accuracy. “Near enough” isn't enough if users need exact doors, platforms, or entrances.
- Plan update ownership. Someone must own route changes when the venue changes.
- Pilot in a live environment. Signal-rich showcase areas tell you very little.
Buy for maintenance reality, not pilot-day performance.
Frequently Asked Questions about Route Optimization Algorithms
What is a route optimization algorithm?
A route optimization algorithm is a method for choosing the most suitable route under real constraints. It doesn't just calculate a path. It weighs factors such as time, distance, access, and operational rules.
Is the shortest route always the best route?
No. The shortest route can be operationally worse if it violates time windows, capacity limits, accessibility needs, or real-world access restrictions.
What is the difference between TSP and VRP?
TSP focuses on one traveller visiting multiple locations in the best sequence and returning to the start. VRP expands that into a fleet problem with multiple vehicles and added operational constraints.
Why do route optimization algorithms struggle indoors?
They struggle indoors because standard systems often lack reliable positioning, miss hidden constraints, and stop at approximate destinations rather than exact usable endpoints. Indoor and underground spaces also contain practical rules that aren't always present in formal map data.
How do modern pedestrian navigation systems differ from vehicle routing systems?
Pedestrian systems have to solve for human movement in complex spaces, often with accessibility and micro-navigation constraints. Vehicle systems typically optimise road travel between stops, while pedestrian systems must also answer which entrance, corridor, lift, or platform access point is correct.
What should buyers look for in a route optimization algorithm for large venues?
They should look for precise destination guidance, reliability in signal-poor environments, support for real operational constraints, manageable maintenance, and accessibility-aware route logic. If the venue changes often, infrastructure-free deployment is usually easier to sustain.
If you're assessing navigation for stations, hospitals, campuses, retail centres, or other complex venues, Waymap is worth reviewing as an infrastructure-free option for precise indoor, outdoor, and underground guidance. It uses smartphone sensor data and detailed maps rather than installed hardware, which makes it relevant when exact destination guidance and operational maintainability matter.