
3D LiDAR Scanning: A Guide to Precision Venue Mapping
If your venue team is relying on drawings, old surveys, and a signage schedule, the first question isn’t whether you need 3d lidar scanning. It’s whether the information you already trust still matches the physical building people walk through.
That gap matters most in accessibility projects. A route that looks fine on paper can fail in operation because a doorway was narrowed, a retail unit changed use, a barrier appeared, or circulation space now behaves differently at peak times. In large public venues, accuracy isn’t an abstract design issue. It affects whether people can reach the right entrance, platform, clinic, gate, or service desk without confusion.
3D LiDAR scanning is valuable because it gives you a high-confidence record of what is physically visible in the built environment. When treated as the foundation for a digital twin, it can support mapping, design review, and navigation. When it sits in a file without clear downstream use, it becomes an expensive archive.
For venue directors, the practical questions are straightforward. What level of detail do you really need. Which scanning method fits a live, busy site. What will the scan miss. And how will the data stay useful once the venue changes again.
Does Your Building’s Blueprint Match Its Reality?
Most large venues have a documentation problem, not a technology problem. They hold a mixture of CAD files, fit-out drawings, contractor markups, survey snapshots, and local staff knowledge. That can be enough for basic estate management. It usually isn’t enough for accessible navigation.
A mobility project exposes every inconsistency. A route to a platform has to reflect the current platform access, not last year’s refurb package. A hospital entrance strategy has to match live departments, not the original planning set. A shopping centre map has to recognise what visitors experience on foot, including temporary obstructions and reconfigured tenant frontages.
3d lidar scanning matters here because it records the venue as it exists, rather than as it was designed. That’s the strategic value. It gives estates, operations, accessibility, and digital teams a common spatial reference instead of competing versions of the truth.
Why floor area data doesn’t solve a navigation problem
Facilities teams often know their estates in terms of area, use class, and lease boundaries. That’s necessary, but it doesn’t tell you whether the visitor journey works. If your team is still reconciling plans, occupancy assumptions, and circulation zones, this explainer on gross square footage vs net is useful background because it shows how easily property data can diverge from operational reality.
For accessibility, that divergence shows up fast. Net usable area won’t tell you whether a decision point is legible, whether a corridor pinch point affects movement, or whether two nearby doors are easy to distinguish in practice.
Practical rule: Treat the scan as a decision tool, not a trophy asset. If it won’t improve routing, operations, or accessibility delivery, you’re collecting geometry without purpose.
What venue leaders should ask before commissioning a scan
A strong brief starts with intent, not hardware.
- Ask what the scan must support: as-built verification, accessibility review, indoor navigation, asset coordination, or a combination.
- Define the critical journeys first: entrances to platforms, car park to reception, concourse to gate, street to service point.
- Decide what “accurate enough” means: wayfinding needs something different from engineering QA.
- Plan for change: if units, entrances, and points of interest move regularly, a static model won’t be enough on its own.
That last point is where many projects stall. The scan can be precise, but the venue is still a moving target.
How Does 3D LiDAR Scanning Actually Create a Digital Twin?
Think of LiDAR as controlled measuring by reflected light. The scanner sends out laser pulses, those pulses hit surfaces, and the device records the return. Repeat that at scale and you get a dense spatial record of walls, floors, doors, columns, fixtures, and other visible geometry.
That output is called a point cloud. It isn’t a photograph and it isn’t a finished model. It’s a very large set of measured points in 3D space, which software then aligns, cleans, and turns into something teams can use.

What the scanner is really doing
The simplest executive-level distinction is this:
- LiDAR measures geometry directly
- Photography records appearance
- Manual survey records selected dimensions
That’s why LiDAR is so useful in complicated public buildings. It doesn’t depend on someone deciding in advance which dimensions matter. It captures the spatial context around them.
If you want a short technical primer before talking to suppliers, Waymap’s overview of what a LiDAR scanner is is a good starting point.
Why Time-of-Flight matters
One common LiDAR method is Time-of-Flight. In plain terms, it measures how long the laser takes to travel out and return. That timing becomes distance. With enough pulses, the scanner builds a measurable 3D representation of the environment.
For a hospital atrium, rail concourse, or airport hall, that means you can capture large visible spaces quickly and then register multiple scan positions into one coordinated dataset. The result is the start of a digital twin, not because the building has become “smart”, but because you now have a structured spatial reference that digital systems can read.
A quick visual helps if you're explaining this to colleagues outside surveying or digital estates.
Why this differs from photography
Photography can produce highly visual outputs, but it infers depth from overlapping images. LiDAR captures depth as measurement first. That difference matters in repetitive interiors, low-light areas, long corridors, plant-heavy back-of-house zones, and underground spaces where texture and lighting are unreliable.
A digital twin built from 3d lidar scanning also tends to be more useful across teams. Accessibility leads need route confidence. Surveyors need geometry. Operators need an authoritative base plan. A point cloud can support all three, if the capture brief is right.
The scan is the raw truth of visible space. The digital twin only becomes useful when someone turns that truth into operational structure.
What Governs the Quality and Cost of a LiDAR Scan?
Venue directors usually hear vendors talk about scanner models. The more important conversation is about accuracy, point density, and range. Those three variables shape the usefulness of the output and the cost of getting there.
For accessibility work, this isn’t technical trivia. It determines whether the captured environment is detailed enough to support reliable routing to exact doors, decision points, and destinations.
Accuracy decides whether details survive the capture
Angular resolution, which is the density of points captured, directly determines how granular the spatial data will be. For indoor venues where step-accurate directions matter, scanner accuracy is critical. Survey-grade tripod scanners can achieve ±1–3mm accuracy, and Phase-Shift LiDAR optimised for medium-range environments up to 150 metres offers a practical balance for initial venue digitisation, according to Matterport’s LiDAR accuracy guide.
That matters because a coarse dataset can flatten the distinctions that matter in navigation. Tight geometries, doorway edges, architectural recesses, and subtle route cues can all become less reliable when the capture spec is too loose.

Point density affects both usefulness and overhead
Higher point density usually means better spatial fidelity. It also means more scan time, more data to register, larger files, and heavier processing. That’s the trade-off many clients underestimate.
For venue accessibility, higher density tends to be justified in places like:
- Complex decision zones: concourses, ticket halls, interchange points, and retail junctions
- Fine-detail route areas: door clusters, lift lobbies, and platform approaches
- Architecturally irregular spaces: atria, curved corridors, fragmented frontage lines
In simpler back-of-house corridors, a lighter approach may be perfectly acceptable if the objective is broad route continuity rather than engineering verification.
Range changes your survey strategy
Longer range sounds better until you look at the use case. In indoor public venues, you usually need reliable medium-range capture with enough fidelity to distinguish navigationally important features. That often points to more scan positions and better local detail, not fewer scans from farther away.
Operational test: If the route guidance must separate one doorway from another nearby doorway, don’t specify the scan like a general property record.
What actually drives cost
The scanner itself is only one part of the bill. Budget is shaped by the full workflow:
Cost driverWhy it matters in practiceCapture specificationHigher fidelity means more time on site and more data to processVenue complexityMulti-level spaces, irregular geometry, and restricted access increase effortOperational constraintsNight work, phased access, and crowd management affect deployment efficiencyRegistration and QARaw scans need alignment, cleaning, validation, and handover formattingIntended outputA visual model, engineering-grade deliverable, and navigation basemap each require different levels of work
A lot of overspend comes from mismatch. Teams order an engineering-style capture when they only need a navigation-grade basemap, or they buy a lightweight scan and then expect it to support accessibility decisions it was never specified to support.
What works and what doesn’t
What works is aligning the capture spec with the decision you need to make. If the goal is wayfinding, specify for route fidelity. If the goal is structural verification, specify for engineering precision.
What doesn’t work is assuming “high detail” solves everything. More data is only better if someone will process, validate, and operationalise it.
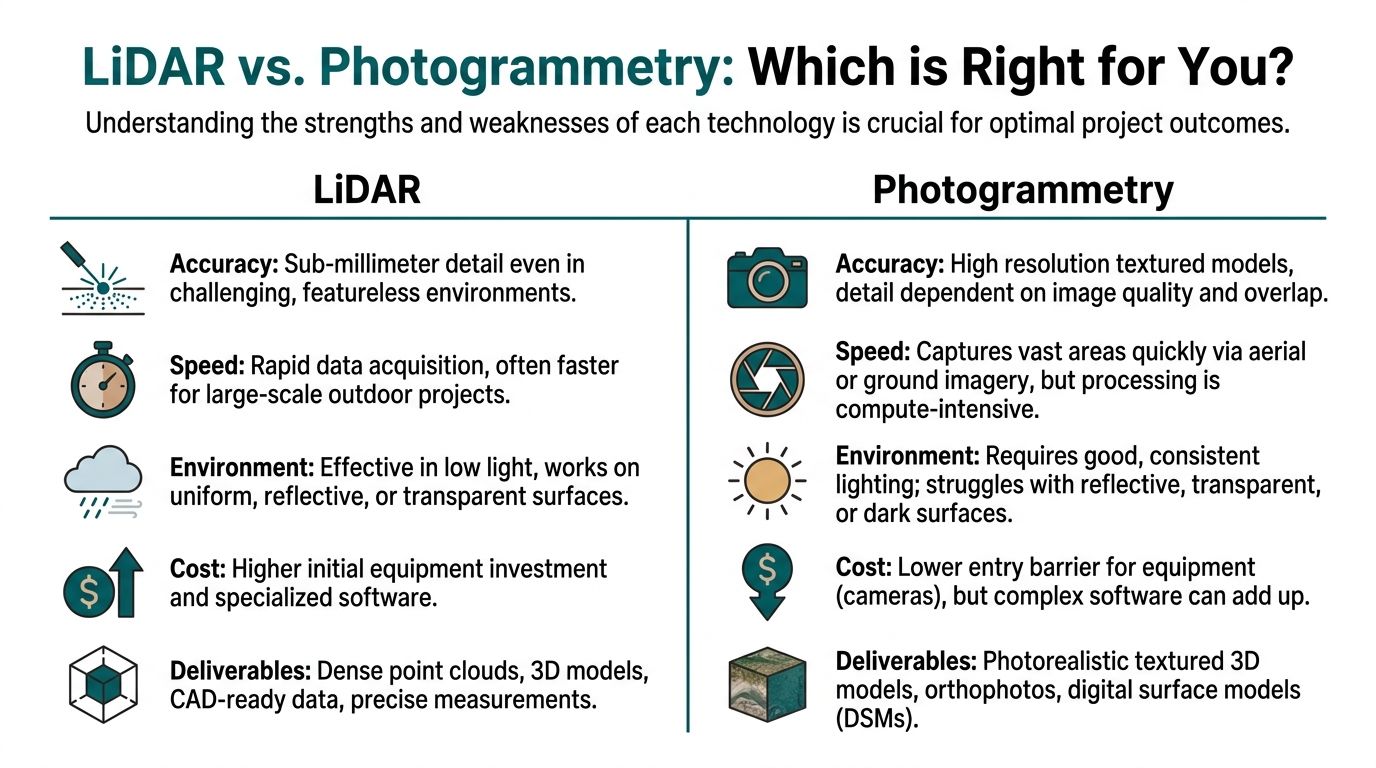
Should You Choose LiDAR or Photogrammetry for Your Venue?
This decision should be made on outcome, not fashion. If you need a trustworthy spatial base for accessible navigation in a complex public building, LiDAR is usually the stronger foundation. If you need rich visuals for presentation, stakeholder engagement, or marketing, photogrammetry can be useful.
The mistake is treating them as interchangeable. They’re not.
The practical difference in venue operations
Photogrammetry builds 3D outputs from overlapping images. It can produce visually convincing models, especially where lighting is stable and surfaces are easy to interpret. But its output depends heavily on what the camera sees and how consistently it sees it.
LiDAR measures geometry directly. In operational environments with repetitive architecture, changing light, reflective materials, underground circulation, or difficult sightlines, that usually gives you a more dependable base.
The LiDAR decision still has a second layer
Even after choosing LiDAR, you still need the right scanning method. Time-of-Flight systems can work at ranges up to 1,000m with 3-6mm accuracy, which suits large campuses and external infrastructure. Phase-Shift technology offers 1-3mm accuracy at up to 150m and is optimised for rapid indoor scanning, which is why it tends to fit complex interiors such as transit hubs and shopping centres more naturally, as outlined in this guide to LiDAR scanning technology trade-offs.
That distinction matters operationally. If your project spans an estate with exterior links and complicated interiors, one capture approach may not fit the whole estate equally well.
Comparison of LiDAR and Photogrammetry for Venue Mapping
Criterion3D LiDAR ScanningPhotogrammetryGeometry captureDirect measurement of surfacesInferred from overlapping imagesSuitability for low lightStrongWeakerPerformance in repetitive interiorsStrongerMore variableVisual textureUsually secondary unless imagery is addedUsually strongerAccessibility mapping useBetter for precise spatial basemapsBetter as a visual supplementUnderground and signal-poor spacesMore dependable as a capture methodMore constrained by lighting and visual qualityEntry costTypically higher equipment thresholdLower hardware barrier
If your team wants a broader view of how mapping technologies fit into navigation and spatial systems, this piece on technology in mapping is a helpful companion.
When photogrammetry still makes sense
Photogrammetry isn’t the wrong choice. It’s the wrong choice for some objectives.
Use it when:
- Visual realism matters most: stakeholder walkthroughs, promotional visualisations, or design communication
- The environment is controlled: good lighting, accessible sightlines, limited complexity
- You’re documenting appearance rather than route-critical geometry
Use LiDAR when geometry must hold up under operational use.
If the model has to support accessibility decisions, favour the method that measures space, not the one that mainly reconstructs it from images.
What Is the Practical Workflow for Scanning a Large Venue?
The workflow is less glamorous than most procurement decks suggest. A successful 3d lidar scanning project depends on planning access, sequencing the capture, registering multiple scans, and checking whether the output is usable for the intended task.
In live venues, the operational burden matters as much as the scanner spec. Shopping centres, stations, and hospitals don’t pause so a survey team can get a clean run.

Start with the journeys, not the whole estate
The first planning decision is scope. Don’t begin by saying “scan everything”. Begin by asking which public journeys must work reliably.
That usually means identifying:
- Primary accessible routes between entrances, lifts, service desks, platforms, gates, clinics, or anchor destinations
- Decision-heavy nodes where users change level, choose between branches, or interact with staff or equipment
- Risk areas such as temporary retail spill-out, queuing zones, complex interchanges, or poorly lit circulation
That scope shapes both budget and disruption. It also stops the project becoming a broad estate survey with no route activation plan.
On-site capture is an operations exercise
Capture in a live venue is about timing, access, and movement control. You may need overnight work, early morning windows, or phased access by area. Back-of-house and public-facing zones often need different treatment.
Good survey teams coordinate with facilities and operations. Weak ones just turn up with equipment and discover too late that the busiest part of the route is impossible to scan cleanly at the agreed time.
Registration and QA are where many projects succeed or fail
After capture, individual scans must be stitched into one coherent dataset. That’s registration. Then the point cloud needs cleaning, checking, and validating against the project brief.
A handover only helps if your team can answer practical questions such as:
- Can we trust the model at route-critical decision points
- Are levels and transitions coherent across the full user journey
- Has transient clutter been removed without erasing permanent navigational features
- Can another system ingest the output without major rework
What LiDAR can’t see is the hidden risk
This is the part many decision-makers only confront late in the project. LiDAR captures visible surfaces. It can’t penetrate walls, slabs, or floors. In underground and legacy venues, that becomes a major limitation.
In the UK, a 2025 Institution of Civil Engineers study found that 70% of legacy as-built drawings for rail assets are inaccurate, and the inability of LiDAR to verify hidden infrastructure is a serious issue in underground transit hubs. That gap matters even more where the 2024 Building Safety Act requires accurate 3D models for accessibility compliance, as discussed in this note on LiDAR limits in complex built environments.
That has two implications. First, a precise scan still won’t reveal everything you need to know about an old transport asset. Second, navigation services shouldn’t depend on a fantasy of perfect omniscience.
Where a hardware-free navigation layer fits
A point cloud is valuable, but public navigation depends on more than geometry. Users move through signal-poor, crowded, changing spaces. They need routing that continues to work when GPS is absent and installed infrastructure is patchy or undesirable.
That’s where a hardware-free model has practical value. Waymap uses detailed maps together with the smartphone’s motion sensors to guide people indoors, outdoors, and underground without depending on GPS, Wi-Fi, or beacons. In complex venues, that means the scan can serve as a high-confidence base while navigation remains usable in the actual operating environment, not just inside a model.
How Do You Turn Scan Data into a Live Navigation Service?
A point cloud is raw spatial evidence, not a wayfinding system in itself. To become useful for visitors, it has to be converted into a maintained navigation layer with destinations, route logic, decision points, and update processes.
That’s the stage many venue projects underestimate. Capture gets funded because it’s tangible. Activation gets delayed because it requires governance.
The basemap has to become operational data
After processing, scan outputs are typically prepared into standard spatial deliverables that other systems can use as a basemap. Then someone needs to define the actual navigable network. That includes entrances, lifts, corridors, crossings, thresholds, destination names, and the logic that connects them.
The key question isn’t whether the scan is accurate. It’s whether your organisation can keep the navigation layer current when retail units move, platforms change use, or temporary diversions appear.
Updates matter more than the initial model
A static digital twin ages quickly in a live venue. Navigation services need a disciplined update process between estates, operations, and customer-facing teams. If your digital team already works with event-based systems, the logic is similar to data stream processing: the value comes from turning changing inputs into timely, usable outputs rather than storing them and reacting later.
That principle is especially important for accessibility. An out-of-date route isn’t just inconvenient. It undermines trust.
Choose the integration model before procurement
Before buying capture, decide where the scan will land.
- Will it feed a GIS or digital twin platform
- Will it support route authoring for public navigation
- Who owns point-of-interest updates
- How will temporary closures be reflected
If you’re evaluating how floor-level spatial data becomes usable for public guidance, Waymap’s overview of floor mapping software is a practical reference.
The strongest deployments treat scanning as one layer in a larger operational stack. The geometry establishes ground truth. The navigation service turns that ground truth into something a visitor can follow. The update process keeps it credible.
A venue doesn’t get value from a scan because the file exists. It gets value when a visitor reaches the right place without needing staff rescue.
Your Questions on 3D LiDAR Scanning Answered
Is 3d lidar scanning worth it for an accessibility project?
Yes, if you need a trustworthy representation of visible space and you have a plan to turn that into maintained routing. It’s most useful where complex layouts, multi-level circulation, and route-critical detail make old drawings unreliable.
It’s less compelling if the project ends at capture and no one funds the operational layer afterwards.
Can LiDAR replace all other building records?
No, it can’t. LiDAR is strong for visible geometry, but it won’t tell you everything about hidden conditions, undocumented services, or the logic behind past alterations.
That matters in older public estates. You should treat the scan as a high-confidence spatial record, not as a complete substitute for every other source.
How accurate does the scan need to be for indoor navigation?
It needs to be accurate enough to preserve route-critical detail. For accessibility, that usually means you should brief for doorway discrimination, decision-point clarity, and level-change fidelity rather than generic estate documentation.
If your brief asks for “a digital twin”, you’re likely to get an output that sounds useful but doesn’t fully support navigation.
Is photogrammetry cheaper?
Often, yes at the point of capture. But lower capture cost doesn’t automatically mean lower project cost.
If the environment is difficult, the lighting poor, or the geometry operationally important, a cheaper visual model can become expensive once teams start compensating for missing or unreliable spatial detail.
How disruptive is scanning in a live venue?
It depends on the venue, the access windows, and the required coverage. Busy public sites usually need planning around operating hours, crowd patterns, restricted zones, and stakeholder approvals.
The best way to reduce disruption is to scope priority journeys first and schedule around real operating conditions, not ideal ones.
Can LiDAR work in the Underground or other signal-poor spaces?
Yes for visible-space capture, but signal conditions are only one part of the challenge. Underground environments bring lighting issues, operational access constraints, legacy alterations, and areas that scanning cannot reveal behind surfaces.
That’s why the navigation layer matters just as much as the scan. In those settings, you need a system designed to operate without depending on satellite positioning or installed hardware.
What should we ask a scanning supplier before appointing them?
Ask how they will handle route-critical detail, scan registration, validation, live-site constraints, and output handover for your intended downstream system. Also ask what the scan will not capture.
That final question usually tells you how realistic the supplier is.
If you're working out whether 3d lidar scanning belongs in your accessibility programme, talk to Waymap. We can help you decide when a scan is necessary, what level of detail a venue needs, and how to turn spatial data into a navigation service people can use indoors, outdoors, and underground.